演習問題の詳解
1.1 (問1) 1,et(問
2)実軸,虚軸(問3) cosθ,sinθ(問4)ある目的,対象,操作
1.2 熱帯魚を水槽で飼育するとき,水温を25℃一定に保たなければならない.これを自動
的におこなうには,サーモスタットの温度センサ(検出器)部分で水槽内の温度を測 り,温度調節器に水槽内の温度を信号として送る.サーモスタットの温度調節器では,
設定した温度との差を検出し,25℃以下であればヒーターの電源を入れ,25℃を超え
ればヒーターの電源を切るといった命令を出し,ヒーターのON-OFFで水温を25℃
に保つ.この一連の流れをブロック図で書くと図A.1のようになり,フィードバック
制御系という.
図A.1 フィードバック制御系の例
1.3 考えられる外乱要因: 人数, 窓や扉の開閉, 天候,学生の服装,コンピュータを使っ
た授業ならばコンピュータの発熱など.
1.4 制御対象,検出部,操作部,制御部
1.5 制御対象:手,操作部:筋肉, 検出部:目,制御器:脳
もしも,ブロック線図を作るとすると図A.2の通りとなる.
1.6 式(1.5)において,a= 10, C0=y(0) = 5とすればy(t) = 5e−10tとなる.
2.1 問1現在の出力,現在の入力,
問2現在の出力,過去の入力,微分方程式
2.2 図2.8の運動方程式は以下で表される.
図A.2 リンゴを手でつかもうとする行動を制御するブロック線図
2.3 図2.9の運動方程式は以下で表される.
My(t) +¨ Dy(t) +˙ Ky(t) =f(t) (A.2)
2.4 式(2.24)よりK= 0とすると,
Jd 2
θ(t) dt2 +B
dθ(t)
dt =τ(t), ここで,ω(t) =˙ d2θ(t)
dt2 であるので,以下が得られる.
Jω(t) +˙ Bω(t) =τ(t) (A.3)
2.5 vR(t) +vC(t) =vin(t), u(t) =vin(t)より,以下が得られる.
Ri(t) + 1 C
t 0
i(τ)dτ=u(t) (A.4)
また,y(t) =vout(t) = 1 C
t 0
i(τ)dτの両辺を微分し,式(A.4)に代入すると,以下
の微分方程式が得られる.
RCdy(t)
dt +y(t) =u(t) (A.5)
2.6 y(t) =i(t)とすると,式(A.4)に代入してRy(t) + 1 C
t
0
y(τ)dτ=u(t)となり,
両辺をtで微分すると以下が得られる.
Rdy(t) dt +
1 Cy(t) =
du(t)
dt (A.6)
2.7 抵抗Rにはv(t)に対応した電流iR(t)が流れ, キャパシタ(コンデンサ)Cには
Cdv(t)
dt に対応した電流iC(t)が流れる.出力y(t) =v(t)とし,キルヒホッフの電流
則is(t) =iR(s) +iC(s)の関係から,入力u(t) =is(t)とすると,以下の微分方程式 が得られる.
Cdy(t) dt +
1
Ry(t) =u(t) (A.7)
3.1 (問1)微分方程式,代数方程式
(問2)留数(ヘビサイドの展開定理),ラプラス変換表
(問3)ブロック,矢印
3.2 解法は2通りある.
i)ラプラス変換表3.1から求める方法, ii)ラプラス変換の定義にそって求める方法,
である.これらの違いによりラプラス変換の簡便性について理解を深めてほしい.
(1) ラプラス変換表3.1より,f(t) = e−atにおいて
a= 3を代入したケースである.
したがって,F(s) = 1 s+ 3
(2) ラプラス変換の定義にそって求める.F(s) =L[f(t)] =
∞
0
f(t)e−st dtより,
L[f(t)] =L[e−3t ] =
∞
0 (e−3t
)e−st dt=
∞
0
(e−(s+3)t )dt
=−s+ 31 e−(s+3)t∞ 0 =−
1
s+ 3[0−1] = 1
s+ 3 (A.8)
3.3 前問[3.2]と同じく解法は2通りある.
(1) ラプラス変換表3.1より,f(t) = 2 sinωt+ cosωtに対応させればよく, F(s) = 2 ω
s2+ω2+ s s2+ω2 =
2ω+s s2+ω2
(2) 式(1.8)よりsinωtおよびcosωtは,それぞれ以下で表される.
sinωt=e jωt
−e−jωt
j2 cosωt= ejωt
+ e−jωt
2 (A.9)
よって,前問[3.2]と同様に計算するとL[sinωt]は以下で表される.
L[sinωt] =
∞
0
sinωte−st dt=
∞
0
ejωt
−e−jωt j2
e−st
dt
= 1 j2
−1 s−jωe
−(s−jω)t ∞ 0
−
−1 s+jωe
−(s+jω)t ∞ 0
= 1 j2
1
s−jω− 1 s+jω
= 1
2j 2jω s2+ω2 =
ω
s2+ω2 (A.10)
同じくL[cosωt]は以下で表される.
L[cosωt] =
∞
0
cosωte−st dt=
∞
0
ejωt + e−jωt
2
e−st dt
=1 2
−1 s−jωe
−(s−jω)t ∞ 0
+
−1 s+jωe
−(s+jω)t ∞ 0 =1 2 1 s−jω+
1 s+jω
=1
2 2s s2+ω2 =
s
s2+ω2 (A.11)
よって,
L[f(t)] =L[2 sinωt+ cosωt] = 2ω s2+ω2 +
s s2+ω2 =
2ω+s
3.4 f(t)を入力,x(t)を出力とすると,「マス–ばね–ダンパシステム」は,
Md 2x(t) dt2 +D
dx(t)
dt +Kx(t) (A.13)
と表わされる.両辺をラプラス変換すると,
L
Md 2x(t)
dt2 +D dx(t)
dt +Kx(t) =L[f(t)] (A.14) M s2X(s) +DsX(s) +KX(s) =F(s) (A.15)
となる.よってG(s) =X(s)
F(s)より,伝達関数G1(s)は以下のとおりとなる.
G1(s) = 1
M s2+Ds+K (A.16)
3.5 問1 入力u(t) =vin(t),出力y(t) =vc(t)とすると,
RCdy(t)
dt +y(t) =u(t) (A.17)
となる.よって,上式をラプラス変換すると,
L
RCdy(t)
dt +y(t) =L[u(t)] (A.18)
RCsY(s) +Y(s) =U(s) (A.19)
となる.よってG(s) = Y(s)
U(s)より,伝達関数G2(s)は以下のとおりとなる.
G2(s) = 1
RCs+ 1 (A.20)
問2 入力u(t) =vin(t), 出力y(t) =i(t)とすると,
Rdy(t) dt +
1 Cy(t) =
du(t)
dt (A.21)
となる.よって,上式をラプラス変換すると
L
Rdy(t) dt +
1
Cy(t) =L
du(t) dt
RsY(s) + 1
CY(s) =sU(s) (A.22)
となる.よってG(s) = Y(s)
U(s)より,伝達関数G3(s)は以下のとおりとなる.
G3(s) = Cs
3.6 伝達関数W(s)は,Y1(s) =W(s)X(s)で表される.では,ブロックW(s)の中身を
つぎの手順で分解してみよう.
(1) Y1(s)に着目すると,ブロックA(s)の前後でY1(s)はZ(s)がA倍されるから Y1(s) =A(s)Z(s)となる.
(2) 同様にブロックB(s)の前後でY2(s)はY1(s)がB(s)倍されるからY2(s) = B(s)Y1(s)となる.
これに加算点の前後における入力の信号と出力信号の関係を表すと,ポジティヴフィー ドバック系であるから,Z(s) =X(s) +Y2(s) =X(s) +B(s)Y1(s)となる.よって,
図3.8の左側は以下の2本の式に帰着する.
Y1(s) =A(s)Z(s) Z(s) =X(s) +B(s)Y1(s)
(A.24)
いまやろうとしていることは,図3.8に示すブロックW(s)の中身を知ることである.
ここで,式(A.24)のZ(s)を消去することにしよう.
Y1(s) =A(s)(X(s) +B(s)Y1(s) (1−A(s)B(s))Y1(s) =A(s)X(s)
Y1(S) =
A(s)
1−A(s)B(s)X(s) (A.25)
となり,伝達関数W(s) = A(s)
1−A(s)B(s)を得る.
3.7 問1 題意より,
f(t) =mdy 2(t)
dt2 (A.26)
問2 このときの物体にかかる加速度はdy2(t)
dt2 =−gである.これをラプラス変換す
ると,
L
dy2(t)
dt2 =−L[g] sV(s)−v(0) =−gs
V(s) =v(0) s −
g
s2 (A.27)
この式を逆ラプラス変換して
L−1
[V(s)] =L−1v(0) s −
g s2 dy(t)
dt =v(0)−gt (A.28)
初期値v(0) =v0であるから,求める速度の式は以下のとおりとなる. dy(t)
問3 前問問2の結果よりdy(t)
dt =v0−gtをラプラス変換すると,
L
dy(t)
dt =L[v0]− L[gt] sY(s)−y(0) = v0
s − g s2 Y(s) = y(0)
s + v0 s2 −
g
s3 (A.30)
この式を逆ラプラス変換すると,
L−1
[Y(s)] =L−1y(0) s +L
−1v0 s2
− L−1g s3
(A.31)
となり,ここで表3.1の
L−1
n! sn+1
=tn
(A.32)
を用いると,
1 n!L
−1
n! sn+1
=n!
n!L
−1
1 sn+1
=L−1
1 sn+1
=t
n
n! (A.33)
と考えることができる.よって,式(A.31)の右辺の第3項の逆ラプラス変換は,
L−1g s3
=gL−11 s3 =g
t2 2!=g
t2 2×1=
1 2gt
2
(A.34)
となる.
式(A.34)の結果を式(A.31)に代入すると以下の結果が導かれる.
y(t) =y(0) +v0t− 1 2gt
2
(A.35)
初期値y(0) =y0であるから
y(t) =y0+v0t−1 2gt
2
(A.36)
となる.
以後の解答では,微分方程式の両辺をラプラス変換するとき,すべての初期値を0とする.
4.1 (問1)なんらかの入力,入力の時間変化,出力の時間変化(問2)一瞬だけの入力(問
3)一定の入力 (問4)伝達関数,インパルス入力,単位ステップ入力,伝達関数,
4.2 式(4.15)の両辺をラプラス変換して整理すると,
U(s) =L[u(t)], Y(s) =L[y(t)], (s+a)Y(s) =bU(s), Y(s) = b
s+aU(s) (A.37)
となる.よって,U(s)からY(s)までの伝達関数G(s)はG(s) = b
s+aとなるが, Y(s) = K
T s+ 1U(s)との対応をとるため,G(s)の分子分母をaで割ると,以下の式
が得られる.
G(s) = b a 1 as+ 1
(A.38)
よって,T=1 a, K=
b
aとなる.これより,a= 1
T, b=Ka= K
T となり,式(4.32)
に代入すると,Y(s) = K
T s+ 1U(s) = K T
s+1 T
U(s)の応答は以下となる.
y(t) = e−T1t y(0) +
t 0
e−T1(t−τ)K
Tu(τ)dτ (A.39)
4.3 高さがhのステップ信号をラプラス変換すると,L[h] =h
sとなる.よって
Y(s) = b
s+aU(s), U(s) = h
s となり,式(4.28)は以下となる.
y(t) =L−1
[G(s)U(s)] =L−1 bh s(s+a) =
bh a(1−e
−at
) (A.40)
4.4 問1 与式をラプラス変換すると,
L[ ˙y(t)] =L[−6y(t) + 3u(t)]
sY(s) =−6Y(s) + 3U(s) (A.41)
G(s) = Y(s) U(s) =
3
s+ 6 (A.42)
問2 インパルス応答のラプラス変換は,
L[ur(t)] = 1 (A.43)
したがって,インパルス応答は
y(t) =L−1 3
s+ 6×1 =L
−1
[G(s)U(s)] = 3L−1 1 s+ 6 = 3e
−6t (A.44)
問3 3
s(s+ 6)を留数(ヘビサイドの展開定理)を用いて部分分数展開する.
3 s(s+ 6)=
α s+
β
s+ 6 (A.45)
最初に,左辺と右辺を入れ替える.つぎに式(A.45)の未定係数α, βを留数(ヘ
ビサイドの展開定理)を用いて決定する.
α s +
β s+ 6=
3
s(s+ 6) (A.46)
(1) まず,αを求める.式(A.45)の両辺に未定係数αの分母の式sを掛けると
α+ sβ s+ 6=
s×3 s(s+ 6)=
3
s+ 6 (A.47)
ここで式(A.45)の未定係数αの分母多項式sを0とする値,すなわち,
s= 0を式(A.47)に代入すると,左辺はαだけが残り,以下の式を得る.
α= 3 s+ 6
s=0
=3 6=
1
2 (A.48)
(2) つぎに,βを求める.今度は,式(A.133)の両辺に未定係数βの分母の式
s+ 6を掛けると
(s+ 6)α s +β=
(s+ 6)×3 s(s+ 6) =
3
s (A.49)
ここで式(A.45)の未定係数βの分母多項式s+ 6を0とする値,すなわち,
s=−6を式(A.49)に代入すると,左辺はβだけが残り,以下の式を得る.
β= 3 s s=
−6
= 3
−6=− 1
2 (A.50)
よって,得られたα,βを式(A.45)に代入すると次のようになる.
3 s(s+ 6)=
1 2 1 s−
1 2
1 s+ 6=
1 2
1 s−
1 s+ 6
(A.51)
問4 式(A.51)を逆ラプラス変換すると,
y(t) =L−1
[Y(s)] =L−1
[G(s)Ur(s)] =1 2L
−11 s−
1 s+ 6 =
1 2
1−e−6t (A.52)
以上により, 単位ステップ応答y(t)が得られた.
5.1 問1 初期値,定常値,過渡特性
0 5 10 15 20 25 0
1
0.2 0.4 0.6 0.8 1.2
図A.3 T = 1, T = 5の場合のインパ
ルス応答
0 5 10 15 20 25 30 35 40 45 50 0
10
5 15
図A.4 T = 2, T= 10の場合のステッ プ応答
問3 減衰比,固有角周波数
問4 3つ,不足減衰,臨界減衰,過減衰
5.2 図A.3にT = 1, T = 5の場合のインパルス応答を描く.
5.3 図A.4にT = 2, T = 10の場合のステップ応答を描く.
5.4 式(5.6)において,t=TとしたときK1−e−T1T
=K
1−e−1≒
0.632Kとな
るからである.
5.5 与式よりG(s) = 2·0.7 2
s2+ 2·0.5·0.7s+ 0.72 と変形できる.よってωn= 0.7, ζ= 0.5
となる.式(5.24)において,K= 2とすると,
y(t) = 2
1−√ 1
1−0.52e
−0.5·0.7t
sin(√1−0.52·0.7t+φ)
= 2
1−√ 1
1−0.25e
−0.35t
sin(0.7√1−0.25t+φ)
φ= tan−1 √
1−0.52 0.5 = tan
−10.866
0.5 = 1.05[rad]
(A.53)
6.1 問1 特性方程式,極,システムの応答
問2 実数部,しない,虚数部,する
問3 実数部,収束
問4 虚数部,速く
問5 実数部が負,代表極
6.2 問1 G1(s), G2(s), G3(s)の分母多項式をs2+ 2ζωns+ωn2の形で表すと以下のとお
りとなる.
(1) G1(s)の分母多項式では,ωn= √
9 = 3, ζ= 3 2ωn =
3
なり,この系は不足減衰である.
(2) G2(s)の分母多項式では,ωn= √
9 = 3, ζ= 6 2ωn =
6
2×3 = 1となり,
この系は臨界減衰である.
(3) G3(s)の分母多項式では,ωn= √
3, ζ= 4 2ωn =
4 2×√3 =
2
√
3>1とな
り,この系は過減衰である.
問2 求めたいのはインパルス応答であるから,入力U(s) = 1を用いる.
(1) G1(s)の応答を求める.
y(t) =L−1[G
1(s)×U(s)] =L−1
9
s2+ 3s+ 9×1
= 2√3L−1 ⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣
3√3 2
s+3 2
2 +
3√3
2 2 ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦
= 2√3e−32tsin3
√
3 2 t (A.54)
(2) G2(s)の応答を求める.
y(t) =L−1
[G2(s)×U(s)] =L−1
4
(s+ 3)2×1 = 4te
−3t
(A.55)
(3) G3(s)の極は−1,−3 となる.G3(s)を以下のとおり部分分数分解してか
ら応答を求める.
3 s2+ 4s+ 3=
3 (s+ 1)(s+ 3)=
α s+ 1+
β
s+ 3 (A.56)
よって,留数定理を用いると定数α, βは,α=3
2, β=− 3
2となる. よって
インパルス応答は以下で求められる.
y(t) =L−1
[G3(s)×U(s)] =L−1
3 2
1 s+ 1−
1 s+ 3
×1
=3 2
e−t
−e−3t
(A.57)
6.3 求めたいのは単位ステップ応答であるから,入力U(s) = 1
sを用いる.
(1) G1(s)の極は− 3 2±j
3 2
√
3となる.G1(s)1
sを以下のとおりに部分分数分解する.
9 (s2+ 3s+ 9)
1 s=
α s +
β
s+3 2+j
3 2
√
3
+ γ
s+3 2−j
3 2
√
3
よって,留数定理を用いると定数α, β, γは,α= 1, β=1 6(j
√
3 + 3),
γ= 1 6(j
√
3−3)となる. したがって,単位ステップ応答y(t)は以下で求めら
れる.
y(t) =L−11 s − 1 6 ⎛ ⎜ ⎜ ⎝L −1 ⎡ ⎢ ⎢ ⎣
j√3 + 3
s+3 2+j
3 2 √ 3 ⎤ ⎥ ⎥ ⎦− L
−1 ⎡ ⎢ ⎢ ⎣
j√3−3
s+3 2−j
3 2 √ 3 ⎤ ⎥ ⎥ ⎦ ⎞ ⎟ ⎟ ⎠
= 1− 1
j2 (
−√3 + 3j)
3 e
−(3 2+j
3 2 √ 3)t +(− √
3−3j)
3 e
−(3 2−j
3 2
√
3)t
= 1− √
3 3 e
−32t(sin3 2
√
3t+ cos3 2
√
3t)
= 1− √
3·√2
3 e
−32t(√1 2sin
3 2
√
3t+√1
2cos 3 2
√
3t)
= 1− √
3 3 e
−32t
sin3 2
√
3tcosπ 4+ cos
3 2
√
3tsinπ 4
= 1− √
3 3 e
−32tsin
3 2
√
3t+π 4
(A.59)
(2) G2(s)の極はG2(s) = 4
(s+ 3)2 より−3(重根)となる.G2(s) 1
sを以下のとおり
に部分分数分解する.
4 (s+ 3)2
1 s =
α s+
β s+ 3+
γ
(s+ 3)2 (A.60)
よって,条件式α+β= 0, 6α+ 3β+γ= 0, 9α= 4より,α=4 9, β=−
4 9, γ=−43となる.したがって,単位ステップ応答y(t)は以下で求められる.
y(t) =4 9L
−11 s−
1 s+ 3−
3 (s+ 3)2
=4 9(1−e
−3t
−3te−3t ) = 4
9{1−(1 + 3t)e
−3t
} (A.61)
(3) G3(s)の極は−1, −3となる.G3(s)1
sを次のとおり部分分数分解する.
3 s2+ 4s+ 3
1 s=
α s +
β s+ 1+
γ
s+ 3 (A.62)
したがって,単位ステップ応答y(t)は以下で求められる.
y(t) =L−11 s−
3 2
1 s+ 1+
1 2
1 s+ 3
= 1−3
2e
−t +1
2e
−3t
(A.63)
6.4 問1 運動方程式は,My(t) +¨ Dy(t) +˙ Ky(t) =f(t)となる.すべての初期値を0と
して両辺をラプラス変換すると,つぎで表される.
(M s2+Ds+K)Y(s) =F(s) (A.64)
したがって,F(s)を入力,Y(s)を出力とする伝達関数G(s)は,つぎで表される.
G(s) =Y(s) F(s)=
1
M s2+Ds+K (A.65)
問2 インパルス応答x(t)は,F(s) = 1より,Y(t) =L−1[G(s)F(s)] =
L−1[G(s)]
で求められる.
(1) M= 1, D= 3, K= 2の場合,G(s) = 1
s2+ 3s+ 2となる.G(s)を以下
のとおりに部分分数分解する.
1 (s+ 1)(s+ 2)=
α s+ 1+
β
s+ 2 (A.66)
よって,留数定理を用いるとα= 1, β=−1となる.したがって,インパル
ス応答y(t)は以下で表される.
y(t) =L−1 1 s+ 1−
1 s+ 2
= e−t
−e−2t
(A.67)
(2) M= 1, D= 2, K= 4の場合,G(s) = 1
s2+ 2s+ 4となる.インパルス応
答y(t)は,以下のように求められる.
y(t) =L−1 1 s2+ 2s+ 4
=L−1 1
(s+ 1)2+ 3
=√1
3L
−1 √
3 (s+ 1)2+ (√3)2
=√1
3e
−t
sin√3t (A.68)
問3 単 位 ス テ ッ プ 応 答x(t) は ,F(s) = 1
s よ り ,x(t) = L
−1
[G(s)F(s)] =
L−1
[G(s)×1s]で求められる.
(1) M = 1, D= 3, K= 2の場合,極は−1, −2であり,G(s)1
sを以下のとお
りに部分分数分解する.
1 s2+ 3s+ 2
1 s=
α s+
β s+ 1+
よって,留数定理を用いるとα= 1
2, β=−1, γ= 1
2 となる. したがって,
単位ステップ応答y(t)は以下で表される.
y(t) =L−11 2
1 s−
2 s+ 1+
1 s+ 2
=1
2(1−2e
−t + e−2t
)
(2) M= 1, D= 2, K= 4の場合,極は−1±j√3であり,G(s) =1 s を次の
とおりに部分分数分解する.
1 s2+ 2s+ 4
1 s=
α s+
β s+ 1−j√3+
γ
s+ 1 +j√3 (A.69)
よって,留数定理を用いるとα=1
4, β=− 3 +j√3
24 , γ=− 3−j√3
24 とな
る.したがって,単位ステップ応答y(t)は以下で表される.
y(t) =1 4L
−11 s−
4 24
3−j√3 s+ 1−j√3−
3 +j√3 s+ 1 +j√3
)
=1 4
1−3−j
√
3
6 e
−(1−j√3)t
−3 +j √
3
6 e
−(1+√3)t
=1 4
1−e−t
ej√3t
+ e−j√3t 2 +j 2 3 √
3e−t
ej√3t
−e−j√3t 2j
=1 4
1−e−t
(cos√3t− √ 3 3 sin √ 3t) =1 4 1 +2
3
√
3e−t (1 2sin √ 3t− √ 3 2 cos √ 3t) =1 4 1 +2
3
√
3e−t
(sin√3tcosφ−cos√3tsinφ)
=1 4 $
1+e−t
sin(√3t+φ)%, φ=−tan−1 √
3 2 1 2
=−tan−1√
3 (A.70)
7.1 問1) 定常値,最終値定理
問2) 負
問3) 特性方程式,極の値,ラウスの安定判別法
問4) 符号の反転,不安定な極
7.2 問1 「分母多項式」= 0すなわちs2+ 2s+ 6 = 0の根が極となり,その値は以下と
なる.
α, β=−1±j√5 (A.71)
問2 システムは安定なので,最終値の定理が使える.題意よりU(s) = 1
sであるか
ら,y(t)の定常値y∞は以下で求められる.
y∞= limt
→∞y(t) = lims→0sY(s) = lims→0sG(s)U(s) = lims→0s 2 s2+ 2s+ 6
1 s
= lim s→0
2 s2+ 2s+ 6=
2 6 =
1
3 (A.72)
7.3 ラウス表を作成すると表A.3のようになる.これよりラウス数列は,上から順に
1, 2, a−2, 4a−18 a−2 , 5
となる.これより,ラウスの安定判別法の第1条件,第
2条件の両方を満たし,かつ安定であるためには,
a−2>0 かつ 4a−18
a−2 >0 (A.73)
が成り立たなければならない.式(A.73)を整理すると,a > 9
2のとき,システムは安
定である.
7.4 判定のためのラウス表を作成する.私の講義では,表A.1,表A.2に示すように 整理
されて見易い判定用のラウス表(表A.1)と,計算用のラウス表(表A.2)を併記して
理解することを推奨している.よって,特性方程式s4+s3+ 3s2+ 6s+ 2 = 0が条件
1と条件2を満足していなければ,G(s)は不安定であると判定できる.条件1が成立
した場合にのみ,ラウス表を作り条件3を調べればよい.なお,符号反転の回数は,た
とえば,ラウス数列が{1,1, 1, -2,5,2}となった場合は,1から−2で1回,−2か
ら5でもう1回となるので合計2回であり,G(s)の不安定な極の数は2個であること
がわかる.
表A.1 清書用のラウス表 表ポットA.2 計算用のラウス表とピ
7.5 (1) G1(s)の分母多項式の係数は,次数の高い順から1, 2, −3となり,負の実数の値
が存在する.したがって,ラウスの安定判別法の第1条件よりシステムは不安定
である.さらに,G(s)の分母多項式はsの2次式であり,極α, βは以下となる.
α, β=−2± &
22−4×1×(−3)
2 =
−2±4
したがって,β >0となり,不安定な極の数は1個である.
(2) G2(s)の分母多項式の係数は,次数の高い順から1, 5, 10, 25となり,すべて正
の実数であるから,ラウスの安定判別法の第1条件を満たす.以下に,ラウス表
(表A.4)を作成する.ラウス数列は,上から順に{1, 5, 5, 25}となり,すべて正
の値をとる.したがって,ラウスの安定判別法の第2条件よりシステムは安定で ある.
(3) G3(s)の分母多項式の係数は1, 8, 16, 40, 100となり,すべて正であるから,ラ
ウスの安定判別法の第1条件を満たす.以下に,ラウス表(表A.5)を作成する.
ラウス数列は,上から順に1,8,11,−36011,100
となり,途中で符号が2回変
わる.ラウスの安定判別法のしたがって,第2条件よりシステムは不安定で,不
安定な極の数は2個である.
表A.3 7.3のラウス表 □はピポット
s4
1 a 5
s3
2 4
s2 2 ×a−1×4
2 =
a−2 2×5−1×0
2 = 5
s1 (
a−2)×4−2×5
a−2 =
4a−18
a−2
s0
4a−18
a−2 ×5−(a−2)×0
4a−18
a−2
= 5
表A.4 7.5 (2)のラウス表 □はピポット
s3
1 10
s2
5 25
s1 5×10−1×25
5 = 5
5 ×0−1×0
5 = 0
s0 5×25−5×0
5 = 25 0
表A.5 7.5 (3)のラウス表 □はピポット
s4
1 16 100
s3 8 40
s2 8×16−1×40 8 = 11
8×100−1×0 8 = 100 s1 11×40−8×100
11 =− 360
11
11×0−8×0 11 = 0 0
s0 −
360
11 ×100−11×0 −360
11
= 100 0 0
8.1 問1 正弦波,周波数応答
問2 角周波数,ゲイン,位相,振幅,位相
問3 基本要素,周波数特性,小さくなり,遅れる
問4 1デカード(decade)
8.2 問1 G(s) = K
ii) K& 1 (ωT)2+ 1
iii) −tan−1ωT
8.3 システムが不安定ということは,出力,つまり周波数応答が発散するということであ
る.よって,出力の振幅を測定することができないため.
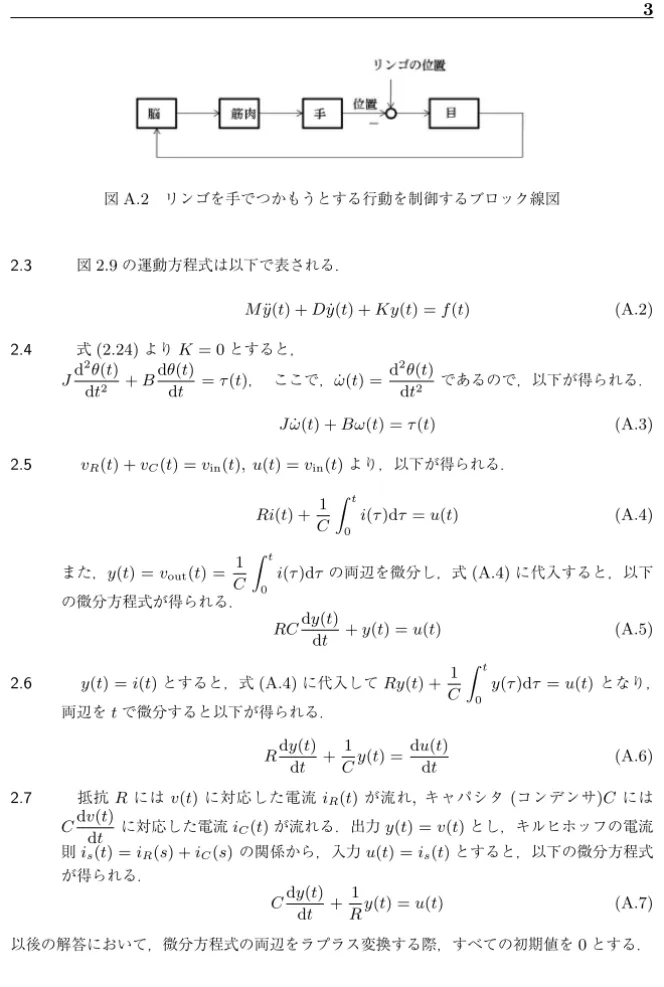
8.4 ゲイン特性は,図A.5に示すi)からiv)のとおりである.
10 −2
10 −1
10 0
10 1
10 2 0
−50 50 (i)
10 −2
10 −1
10 0
10 1
10 2 0
−50 50 (iii)
10 −2
10 −1
10 0
10 1
10 2 0
−50 50 (ii)
10 −2
10 −1
10 0
10 1
10 2 0
−50 50
20 dB/dec (iv)
図A.5 ゲイン特性(左上i),右上ii),左下iii),右下iv))
8.5 T= 0.1,10の場合,折れ点周波数ωcはそれぞれ10,0.1[rad/s]となる.また位相線
図は折れ点周波数において45[deg]遅れる. ゲイン・位相線図の概形は他のTと同じと
なるので,求めるボード線図はそれぞれ,図A.6,図A.7となる(ゲイン線図は折れ線
近似).
9.1 問1 ボード線図,足し合わせ,折れ線近似
問2 角周波数,小さく,遅れる
問3 振幅,共振,0< ζ <√1
2
9.2 考え方は,与えられた伝達関数を基本要素に分解し,それぞれの基本要素を時定数に注
意して変形し,折れ点周波数を求める.続いて,それらのボード線図を折れ線近似にて 描き最後に足し合わせればよい.
i) 与えられた伝達関数を以下のとおりに分解する.
G(s) = 20
s+ 20= 20× 1 20 1 20s+ 1
= 1× 1 1 20s+ 1
=G1(s)×G2(s)
つまり,比例要素G1(s) = 1と1次遅れ要素G2(S) = 1 1 20s+ 1
(折れ点周波数は
20[rad/s])に分解できるので,ボード線図の折れ線近似を描くと図A.8となる.
10 −2 10 −1 10 0 10 1 10 2 10 3 10 4 0 −50 −20 dB/dec 10 −2 10 −1 10 0 10 1 10 2 10 3 10 4 0 −100
図A.6 折れ点周波数ωc= 10[rad/s]の
場合のボード線図
10 −3 10 −2 10 −1 10 0 10 1 10 2 10 3 0 −50 −20 dB/dec 10 −3 10 −2 10 −1 10 0 10 1 10 2 10 3 0 −100
図A.7 折れ点周波数ωc= 0.1[rad/s]の
場合のボード線図
G(s) = 1 s(s+ 10)=
1 10×
1 s×
1
0.1s+ 1=G1(s)×G2(s)×G3(s)
つまり,比例要素G1(s) = 1
10,積分要素G2(S) = 1
s および,1次遅れ要素
G3(S) = 1
0.1s+ 1 (折れ点周波数は10[rad/s])に分解できるので,ボード線図
の折れ線近似を描くと図A.9となる.
iii) 与えられた伝達関数を以下のとおりに分解する.
G(s) = s+ 100 (s+ 1)(10s+ 1)
= 100×(0.01s+ 1)×s+ 11 ×10s1+ 1
=G1(s)×G2(s)×G3(s)×G4(s)
つまり,比例要素G1(s) = 100,1次進み要素G2(s) = 0.01s+ 1,1次遅れ要
素G3(S) = 1
s+ 1 および,1次遅れ要素G4(S) = 1
10s+ 1 (折れ点周波数は
0.01,1,10[rad/s])の3カ所に分解できるので,ボード線図の折れ線近似を描くと
図A.10となる. 破線は各要素の折れ線近似であり,実線は合成した折れ線近似で
ある.
9.3 次の4段階に分けて考えると良い.
step 1) ω の 値 が 10−3∼
100[rad/s] の 間 で ,低 周 波 数 帯 域 で の 一 定 の ゲ イ ン 20[dB/dec]であるということは,G1(s) = 10が存在する.
step 2) ωの値が100∼5[rad/s]の間で,ゲインは
−40[dB/dec]で減少しているとい
うことは,折れ点周波数 1
T = 1[rad/s]で1次遅れ要素 1
s+ 1をかけ合わせた特
性が必要となるので,G2(s) = 1
(s+ 1)2が存在する.
10 −1 10 0 10 1 10 2 10 3 10 4 0 −50 10 −1 10 0 10 1 10 2 10 3 10 4 0 −100
図A.8 9.2 i)の折れ線近似
10 −2 10 −1 10 0 10 1 10 2 10 3 10 4 0
−100 −40 dB/dec
10 −2 10 −1 10 0 10 1 10 2 10 3 10 4 −200 −100 −150
図A.9 9.2 ii)の折れ線近似
10 −2 10 −1 10 0 10 1 10 2 10 3 10 4 0 −100 10 −2 10 −1 10 0 10 1 10 2 10 3 10 4 0 −200 −100
図A.10 9.2 iii)の折れ線近似
−40[dB/dec]のゲインの傾きを受け消すために,1次進み要素をかけ合わせた特
性が必要となるので,G3(s) = (0.2s+ 1)2
step 4) ωの値が101[rad/s]からはゲインはで減少しているため,1次遅れ要素の特性
が必要となり,G4(s) = 1
0.1s+ 1となる.
以上より,求める伝達関数は以下となる.
G(s) =G1(s)·G2(s)·G3(s)·G4(s) = 10× 1
(s+ 1)2×(0.2s+ 1) 2
× 1
0.1s+ 1
10.1 問1 ベクトル軌跡,複素平面
問3 ベクトル軌跡,実部,虚部
10.2 図A.11に微分要素のベクトル軌跡を示す.
10.3 図A.12にむだ時間要素のベクトル軌跡を示す.
図A.11 微分要素のベクトル軌跡
図A.12 むだ時間要素のベクトル軌跡
11.1 問1 −1 +j0,安定,不安定
問2 開ループ,不安定な極,ナイキスト,フィードバック
問3 ベクトル軌跡,ボード線図,ゲイン,位相
問4 開ループ極,原点
11.2 関係する式を対応させると,
Np(s) = 1, Dp(s) =s−3 Nc(s) =s−3 , Dc(s) =s+ 3
となる.
11.3 問1 不安定な開ループ極の数はDp(s)Dc(s) = (s−3)×(s+ 3)より,−3,3が開
ループ極であり,P= 1となる.
問2 開ループ伝達関数は,L(s) =P(s)C(s) = 1 s−3×
s−3 s+ 3=
1
s+ 3でとなる.
問3 ナイキスト軌跡は図11.5と一致する.したがってN= 0である.
問4 N =Z−P よりZ = 1であり,不安定な閉ループ極が1つ存在するため,
11.4 一巡伝達関数L(s)の周波数伝達関数は,
L(jω) = 40
jω(−ω2+j5ω+ 2)=
−200ω2−j40(−ω3+ 2ω) (−5ω2)2+ (−ω3+ 2ω)2
となる.位相が−180[deg]のとき,虚部が0となるので−ω3+ 2ω = 0より,位
相交差周波数ωpcはωpc =√2[rad/s]となる.このとき,L(jωpc) =−4となり |L(jωpc)|= 4となる.よってGM =
1
4 = 20 log10 1
4−12.04[dB]となり,不安定
となる.
11.5 一巡伝達関数L(s)の周波数伝達関数は,
L(jω) = 5
jω(jω+ 1)(jω+ 2)=
5
−3ω2+jω(2−ω2)
=−9ω2+ (215−ω2)2−j
5(2−ω2)
ω{9ω2+ (2−ω2)2} (A.75)
となる.
◆ ω= 0のとき,|L(j0)|=∞, ∠L(j0) =−90[deg]
◆ ω=∞のとき,|L(j∞)|= 0, lim ω→∞
∠L(jω) = lim ω→∞
5
(jω)3 =−270[deg]
◆ ω=ωπのとき,Im[L(jω)] = 0より,ωπ=√2となり,このときのゲインは次
式となる.
|L(jω)|= −
15 9×2
=15 18=
5
6= 0.833<1 (A.76)
図A.13のようにナイキスト軌跡を描いてみると,点−1 +j0を常に左側に見ているの
で,フィードバック制御系は安定である.
図A.13 L(s) = 5
s(s+ 1)(s+ 2)のナイキスト軌跡
12.1 問1 できない
問2 できない
問3 出現する
12.2 問1 設計パラメータ,できる,不安定
問2 できる
12.3
図A.14 外乱を含むフィードバック制御系
問1 求めるブロック線図を図A.14に示す.
問2 考え方の基本となるのは,以下の式(A.77)である.
⎧ ⎪ ⎨ ⎪ ⎩
zone ア E(s) =R(s)−Y(s) zone イ U(s) =C(s)E(s)
zone ウ Y(s) =P(s)(U(s) +D(s))
(A.77)
各伝達関数を求めるポイントは以下のとおりである.
I) Gur(s), Gyr(s)を求めるときは,外乱D(s) = 0として式(A.77)から計算
する.
⎧ ⎪ ⎨
⎪ ⎩
E(s) =R(s)−Y(s) ア U(s) =C(s)E(s) イ Y(s) =P(s)U(s) ウ
(A.78)
II) 一方,Gud(s), Gyd(s)を求めるときは,目標値R(s) = 0として式(A.77)
から計算する.
⎧ ⎪ ⎨ ⎪ ⎩
E(s) =−Y(s) ア U(s) =C(s)E(s) イ
Y(s) =P(s)(U(s) +D(s)) ウ
(A.79)
i) Gur(s)を求める.
式(A.78)の式イに式アを代入してE(s)を消去するとU(s) =C(s)(R(s)−
Y(s))を得る.ここでの目的は,U(s)とR(s)との関係を求めることである
から,これに式(A.78)の式ウを代入してY(s)を消去する.以上を整理する
とGur(s) = U(s) R(s)=
C(s)
1 +P(s)C(s)を得る. ii) Gud(s)を求める.
式(A.79)の式イに式アを代入してE(s)を消去するとU(s) =−C(s)Y(s)
これに式(A.79)の式ウを代入してY(s)を消去する.以上を整理すると
Gud(s) = U(s) D(s)=−
P(s)C(s)
1 +P(s)C(s)を得る. iii) Gyr(s)を求める.
式(A.78)の式イに式アを代入してE(s)を消去するとU(s) =C(s)(R(s)−
Y(s))を得る.ここでの目的は,Y(s)とR(s)との関係を求めることである
から,これに式(A.78)の式ウを代入してU(s)を消去する.以上を整理する
とGyr(s) =Y(s) R(s)=
P(s)C(s)
1 +P(s)C(s)を得る. iv) Gyd(s)を求める.
式(A.79)の式イに式アを代入してE(s)を消去するとU(s) =−C(s)Y(s)
を得る.ここでの目的は,Y(s)とD(s)との関係を求めることであるから,
これに式(A.79)の式ウを代入してU(s)を消去する.以上を整理すると
Gyd(s) = Y(s) D(s)=
P(s)
1 +P(s)C(s)を得る.
12.4 問1,問2 合わせて解答する.
問1で以下の4つの伝達関数を求める.
Gur(s) = C(s)
1 +P(s)C(s), Gud(s) =−
P(s)C(s) 1 +P(s)C(s)
Gyr(s) =−Gud(s), Gyd(s) = P(s) 1 +P(s)C(s)
問2でフィードバック制御系の安定性を判別するためには,問1で得られた4つの伝
達関数の極を調べればよい.
i) Gur(s) = s−1
s2+ 2s−2, Gud(s) =− 1 s2+ 2s−2 Gyr(s) = 1
s2+ 2s−2, Gyd(s) = s+ 3 s2+ 2s−2
よって,4つの伝達関数の極は,特性方程式s2+2s
−2 = 0を解くと,s=−1±√3
となる.ここで,−1 +√3>0の実部が正の極が存在するので,制御系は安定に
はならない.
ii) Gur(s) = 10(s−1)
s2+ 2s+ 7, Gud(s) =− 10 s2+ 2s+ 7 Gyr(s) = 10
s2+ 2s+ 7, Gyd(s) = s+ 3 s2+ 2s+ 7
よって,4つの伝達関数の極は,特性方程式s2+ 2s+ 7を解くと,s=
−1±j√6
となる.ここで,実部が−1<0となるので,制御系は安定となる.
iii) Gur(s) =s−2
s+ 2, Gud(s) =− 1 s+ 2 Gyr(s) = 1
s+ 2, Gyd(s) =
s+ 1 (s+ 2)(s−2)
よって,4つの伝達関数のうち,Gyd(s)が不安定な極s= 2を持つため,制御系
iv) Gur(s) = s+ 10
(s+ 11)(s−3), Gud(s) =− 1 s+ 11 Gyr(s) = 1
s+ 11, Gyd(s) = s−3 s+ 11
よって,4つの伝達関数のうち,Gur(s)が不安定な極s= 3を持つため,制御系
は安定にはならない.
v) Gur(s) = s+ 3
2s+ 3, Gud(s) =− s+ 1 2s+ 3 Gyr(s) = s+ 1
2s+ 3, Gyd(s) =
(s+ 1)(s+ 2) (2s+ 3)(s+ 3)
よって,4つの伝達関数の極は,Gur(s), Gud(s), Gyr(s)の極がs=−3
2<0, Gyd(s)
がs=−32, −3となり,実部はすべて負である.したがって,制御系は安定に
なる.
13.1 問1 比例制御,積分制御,微分制御
問2 Pゲイン(Kp),Iゲイン(Ki),Dゲイン(Kd)
問3 根軌跡,極の変化
13.2 問1 フィードバック制御系の内部安定性を判別するためには,以下の4つの伝達関数
の極を調べればよい.
Gur(s) = C(s)
1 +P(s)C(s), Gud(s) =−
P(s)C(s) 1 +P(s)C(s)
Gyr(s) =−Gud(s), Gyd(s) = P(s) 1 +P(s)C(s)
コントローラをC(s) =Kpとするので,4つの伝達関数は以下で表される.
Gur(s) = Kp(s−3)
s−3 +Kp, Gud(s) =− Kp s−3 +Kp Gyr(s) = Kp
s−3 +Kp, Gyd(s) = 1 s−3 +Kp
問2 Kpを変数とする,関数s=f(Kp) = 3−Kpである.4つの伝達関数の極は, s−3 +Kp= 0を解いて,p(Kp) = 3−Kpとなる.したがって,実部が−3よ
り小さくなる条件は,3−Kp<−3より,Kp>6となる.
13.3 問1 コントローラをC(s) = Kps+Ki
s とするので,4つの伝達関数は以下で表され
る.
Gur(s) = (Kps+Ki)(s−3)
s2+ (Kp−3)s+Ki, Gud(s) =−
Kps+Ki s2+ (Kp−3)s+Ki Gyr(s) = Kps+Ki
s2+ (Kp−3)s+Ki, Gyd(s) =
s
s2+ (Kp−3)s+Ki
問2 4つの伝達関数の極p(Kp, Ki)は方程式s2+ (Kp
−3)2s+Ki= 0を解いて,
以下となる.
p(Kp, Ki) =−(Kp−3)± &
したがって,p(Kp, Ki)の実部が−2未満になる条件は以下で表される. ・(Kp−3)2
−4Ki>0のとき:極は相異なる実数となるから,
−(Kp−3)±&
(Kp−3)2−4Ki
2 <−2
・(Kp−3)2
−4Ki≤0のとき,:−(Kp−3)
2 <−2より,Kp>7
13.4 問1 P(s)に対してラウスの安定判別法を適用する.P(s)の分母多項式s3+s2+6s+8
の係数は1,1,6,8より,すべて正であるため第1条件および欠項がないので第2
条件を満たす.そこでラウス表(表A.6)を作成する.ラウス数列は,上から順に
1,1,−2,8となり,符号が2回変わるから,P(s)の不安定な極は2個である.
表A.6 13.4問1のラウス表 □はピポット
s3
1 6
s2
1 8
s1 1 ×6−1×8
1 = -2
1×0−1×0
1 = 0
s0 -2×8−1×0
-2 = 8 0
問2 P(s)にP制御法を適用した場合,4つの伝達関数Gur(s), Gud(s), Gyr(s), Gyd(s)
は以下で表される.
Gur(s) = Kp(s
3+s2+ 6s+ 8)
s3+s2+ 6s+Kp+ 8, Gud(s) =−
Kp
s3+s2+ 6s+Kp+ 8 Gyr(s) = Kp
s3+s2+ 6s+Kp+ 8, Gyd(s)
1
s3+s2+ 6s+Kp+ 8
4つの伝達関数の分母多項式はs3+s2+ 6s+Kp+ 8となる.ラウスの安定判
別法を用いて,制御系が安定となるKpの範囲を求める. 分母多項式の係数は
Kp+ 8,6,1,1となるから,第1条件Kp+ 8>0より,すなわちKp>−8と
なる.第2条件について調べるため,ラウス表(表A.7)を作成する.ラウス数
列は,上から順に1,1,−Kp−2, Kp+ 8となる.これより,−Kp−2>0かつ
Kp+ 8>0が得られ,第1条件と合わせて考えると,制御系が安定となるのKp
範囲は,−8< KP <−2となる.以上より,不安定なP(s)にP制御法を適用
し,フィードバック制御系を安定にすることができる.
表A.7 13.4問2のラウス表 □はピポット
s3
1 6
s2
1 Kp+ 8
s1 1 ×6−1×(Kp+ 8)
1 = −
Kp−2 1×0−1×0
1 = 0
s0 (−
Kp−2)×(Kp+ 8)−1×0 −Kp−2
14.1 問1 目標値,定常偏差
問2 安定,最終値定理
問3 内部安定性,制御系の型,一致させる
14.2 問1 L(s) =P(s)C(s)を開ループ伝達関数という.
問2 目標値R(s)から偏差E(s)までの伝達関数Ger(s)は以下で表される.
Ger(s) = 1 1 +P(s)C(s) =
s2+ 5s+ 12
s2+ 6s+ 16 (A.80)
となる.Ger(s)の極は−3±j7となり,安定となる.R(s) = 1
s であることか
ら,目標値に対する定常偏差は最終値定理より以下で求められる.
e∞= lims
→0sE(s) = lims→0sGer(s)R(s) = lims→0s
s2+ 5s+ 12 s2+ 6s+ 16 1 s=
12 16=
3 4 (A.81)
L(s)に対して,目標値をr(t) = 1(単位ステップ信号)で与えたときの定常偏差を
求めなさい.ただし,外乱は0とする.
14.3 問1 目標値R(s),外乱D(s)を用いた偏差E(s)の伝達関数は以下で表される.
E(s) = 1
1 +P(s)C(s)R(s)−
P(s)
1 +P(s)C(s)D(s)
= s
2(s+ 5)
s3+ 5s2+ 3s+ 6R(s)−
s(s+ 2)
s3+ 5s2+ 3s+ 6D(s)
問2 目標値が単位ランプ信号であって,外乱が0の場合は,R(s) = 1
s2, D(s) = 0よ
り,目標値に対する定常偏差e∞は,最終値定理より以下で求められる.
e∞= lims →0s
s2(s+ 5) s3+ 5s2+ 3s+ 6
1
s2 = 0 (A.82)
問3 一方,目標値を0とすると,外乱が単位ランプ信号の場合は,R(s) = 0, D(s) =
1
s2より,外乱に対する定常偏差e∞は以下で求められる.ただし,ここで気をつ
けなくてはならないのは
E(s) = 1
1 +P(s)C(s)R(s)−
P(s)
1 +P(s)C(s)D(s)
= 1
1 +L(s)R(s)− P(s)
1 +L(s)D(s) (A.83)
式(A.83)に示されるとおり,外乱D(s)に対する定常偏差の成分がマイナスにな
ることである.
e∞=−slim →0s
s(s+ 2) s3+ 5s2+ 3s+ 6
1 s2 =−
2 6=−
1
14.4 制御系が安定になるKpの範囲は,4つの伝達関数の分母多項式s−3 +Kpがとなり,
極が3−Kpとなることから,制御系が安定となる条件は,Kp>3となる.さらに,
目標値R(s)と偏差E(s)の関係は,
E(s) = 1
1 +P(s)C(s)R(s) = s−3
s−3 +KpR(s) (A.85)
となる.目標値を高さrのステップ信号とすると,
L[r·us(t)] =r
s (A.86)
である.最終値定理を用いて目標値に対する定常偏差e∞を計算すると,以下が得ら
れる.
e∞= lims →0s
s−3 s−3 +Kp
r s =
−3r
Kp−3 (A.87)
ステップ信号の目標値に対する定常偏差が5%以内となるためには,以下の不等式を満
たす必要がある.
−3r Kp−3
<0.05|r| (A.88)
よって,Kp−3>0に注意してこの不等式をKpについて解くと,
3<0.05(Kp−3) (A.89)
この不等式を解くとKpの範囲は,Kp>63となる.
14.5 内部モデル原理より.ステップ信号を目標値としたときの定常偏差を0にするために
は制御系が安定で,かつC(s)がs= 0の最低でも1個の極を持つ必要がある.例とし
て,PI制御
C(s) =Kps+Ki
s (A.90)
を適用する.この場合,内部安定性の条件となる4つの伝達関数の特性多項式は,一巡
伝達関数(開ループ伝達関数)1 +L(s) = 1 +P(s)C(s)の通分された分子の部分とな
る.すなわち,sの2次式s2+ (Kp−3)s+Kiとなる.これまでの講義の予復習の
成果を活かし,極を直接求めるか,ラウスの安定判別法などにより,制御系が安定にな るKp, Kiの範囲を求めると,Kp>3, Ki>0となる.このとき,目標値をステップ
信号にした場合の定常偏差e∞は,
E(s) = 1 1 +P(s)C(s)=
s(s−3)
s2+ (Kp−3)s+Ki (A.91)
より,最終値定理を用いて,以下のように得られる.
e∞= lims →0s
s(s−3) s2+ (Kp−3)s+Ki
r s =
0
15.1 ア 操作 イ 思い通り ウ dy(t)
dt エ x(t)˙ オ 動的システム カ
出力 キ t ク 微分方程式 ケ s コ 代数方程式
サ
システムの応答 シ 一瞬だけの入力 ス 一定の大きさの入力
15.2 t領域での微分を定義した以下の式を利用する.
L[f′(t)] =sF(s)
−f(0) (A.93)
L[f′′(t)] =s2
F(s)−sf(0)−f′(0) (A.94)
(a)
L
dy(t)
dt =L[100y(t)] sY(s)−y(0) = 100Y(s) (s−100)Y(s) =y(0)
Y(s) = y(0) s−100=
−10
s−100 (A.95)
逆ラプラス変換すると,
L−1[Y(s)] =y(t) = −10e100t
(A.96)
(b)
L
dy(t)
dt =L[−0.3y(t)] sY(s)−y(0) =−0.3Y(s) (s+ 0.3)Y(s) =y(0)
Y(s) = y(0) s+ 0.3=
1
s+ 0.3 (A.97)
逆ラプラス変換すると,
L−1
[Y(s)] =y(t) = e−0.3t
(A.98)
(c)
L[ ˙y(t) + 2y(t)] =L[e−t ]
sY(s)−y(0) + 2Y(s) = 1 s+ 1
(s+ 2)Y(s) = 1
s+ 1+y(0)
Y(s) = 1
(s+ 1)(s+ 2)+ y(0) (s+ 2)=
1 (s+ 1)(s+ 2)−
1 s+ 2
留数を用いて右辺を部分分数展開すると,Y(s) = 1 s+ 1−
2
s+ 2となり,これを
逆ラプラス変換すると,
L−1
[Y(s)] =y(t) = e−t
−2e−2t
(A.100)
(d)
L[y′′(t) +y′(t)] =L[us(t)]
s2Y(s)−sy(0)−y′(0) +sY(s)
−y(0) =1 s
(s2+s)Y(s) =1 s
Y(s) = 1
s2(s+ 1) (A.101)
留数を用いて右辺すべてを部分分数展開すると,Y(s) = 1
s2− 1 s+
1
s+ 1となり,
これを逆ラプラス変換すると,
L−1
[Y(s)] =y(t) =t−1 + e−t
(A.102)
15.3 以後の解答において,微分方程式の両辺をラプラス変換する際,すべての初期値を0と
する.
問1
˙
y(t) =−4y(t) + 4u(t) (A.103)
をラプラス変換すると,以下が得られる.
L[ ˙y(t)] =L[−4y(t) + 4u(t)] (A.104)
sY(s) =−4Y(s) +Y U(s)⇒(s+ 4)Y(s) = 4U(s) (A.105)
よって,G(s) =Y(s) U(s)=
4
s+ 4より,伝達関数は以下となる.
G(s) = 4
s+ 4 (A.106)
問2 インパルス関数をδ(t)すると,以下が得られる.
L[δ(t)] = 1 (A.107)
よって,インパルス応答y(t)を逆ラプラス変換の定義にそって求めると,以下が
得られる.
y(t) =L−1[G(s)
·1] =L−1 4
s+ 4·1 = 4e
−4t
問3 単位ステップ入力信号は,Us(s) =L[us(t)] = 1
sより,ラプラス変換表を用い
て以下で計算できる.単位ステップ応答は出力信号Y(s)を伝達関数G(s)と入力
信号Us(s)との積Y(s) =G(s)Us(s)にて求める.すなわち,
Y(s) =G(s)Us(s) = 4 s+ 4×
1 s=
4
s(s+ 4) (A.109)
4
s(s+ 4)を留数(ヘビサイドの展開定理)を用いて部分分数展開する.
4 s(s+ 4)=
α s+
β
s+ 4 (A.110)
式(A.110)の未定係数α, βを留数(ヘビサイドの展開定理)を用いて分解す
る.そして,左辺と右辺を入れ替える.すなわち,
α s +
β s+ 4=
4
s(s+ 4) (A.111)
(1) まず,αを求める.式(A.111)の両辺に未定係数αの分母の式sを掛けると
α+ sβ s+ 4=
s×4 s(s+ 4)=
4
s+ 4 (A.112)
ここで式(A.112)の未定係数αの分母多項式sを0とする値,すなわち,
s= 0を式(A.134)に代入すると,左辺はαだけが残り,以下の式を得る.
α= 4 s+ 4
s=0
= 4
0 + 4= 4
4 = 1 (A.113)
(2) 次に,βを求める.式(A.110)の両辺に未定係数βの分母の式s+ 4を掛け
ると
(s+ 4)α s +β=
(s+ 4)×4 s(s+ 4) =
4
s (A.114)
ここで,式(A.114)の未定係数βの分母多項式s+ 4を0とする値,すなわ
ち,s=−4を式(A.136)に代入すると,左辺はβだけが残り,以下の式を
得る.
β= 4 s s=
−4 = 4
−4 =− 4
4=−1 (A.115)
よって,得られたα,βを式(A.110)に代入すると次のようになる.
4 s(s+ 4)=
4 s−
1
よってこれを逆ラプラス変換すると,
y(t) =L−1
[Y(s)] =L−1
[G(s)Ur(s)] =L−11 s−
1 s+ 4
=L−11 s−
1
s+ 4 = 1−e
−4t
(A.117)
以上により, 単位ステップ応答y(t)が得られた.
15.4 問1 分母多項式(特性多項式)が1次式となっているので,1次遅れ系という.
問2 特性多項式が20s+ 1 = 0となる.よってこの解(極)は−201 である.
問3 G(s) = 30
30s+ 1,よってインパルス入力δ(t)とすると,このラプラス変換は,
L[δ(t)] = 1となる.したがって,インパルス応答y(t)は
y(t) =L−1 30
30s+ 1×1 =L
1 1
s+ 1 30
= e−301t (A.118)
問4 単位ステップ入力us(t)のラプラス変換は,L[us(t)] = 1
sとなる.したがって,
単位ステップ応答y(t)は
y(t) =L−1 30 30s+ 1×
1 s =L
−11 s×
1 s+ 1
30 =L−130
s − L
−1 30 s+ 1
30 = 30
L−11
s − L
−1 1 s+ 1
30
= 30(1−e−301t) (A.119)
0 50 100 150 200
0 1
0.2 0.4 0.6 0.8
t
図A.15 15.4問3のグラフ
0 50 100 150 200
0 20 40
10 30
t
図A.16 15.4のグラフ
問2 インパルス応答のラプラス変換は
L[ur(t)] = 1 (A.120)
8 s2+ 5s+ 6=
8
(s+ 2)(s+ 3) (A.121)
8
(s+ 2)(s+ 3)を留数(ヘビサイドの展開定理)を用いて部分分数展開する.
8 (s+ 2)(s+ 3)=
α s+ 2+
β
s+ 3 (A.122)
式(A.122)の未定係数α, βを留数(ヘビサイドの展開定理)を用いて分解する.
そして,左辺と右辺を入れ替える.すなわち,
α s+ 2+
β s+ 3=
8
(s+ 2)(s+ 3) (A.123)
(1) まず,αを求める.式(A.123)の両辺に未定係数αの分母の式sを掛けると
α+(s+ 2)β s+ 3 =
(s+ 2)×8 (s+ 2)(s+ 3)=
8
s+ 3 (A.124)
ここで,式(A.122)の未定係数αの分母多項式s+ 2を0とする値,すなわ
ち,s=−2を式(A.134)に代入すると,左辺はαだけが残り,以下の式を
得る.
α= 8 s+ 3
s=
−2
= 8 (A.125)
(2) つぎに,βを求める.式(A.122)の両辺に未定係数βの分母の式s+ 3を掛 けると
(s+ 3)α s+ 2 +β=
(s+ 3)×8 (s+ 2)(s+ 3)=
8
s+ 2 (A.126)
ここで,式(A.123)の未定係数βの分母多項式s+ 3を0とする値,すなわ
ち,s=−3を式(A.126)に代入すると,左辺はβだけが残り,以下の式を
得る.
β= 8 s+ 2
s=
−3
=−8 (A.127)
よって,得られたα,βを式(A.122)に代入すると次のようになる.
8
s2+ 5s+ 6= 8 1 s+ 2−8
1
よってこれを逆ラプラス変換すると,
y(t) =L−1
[Y(s)] =L−1
[G(s)Ur(s)] = 8L−1 1 s+ 2−
1 s+ 3
= 8L−1 1 s+ 2−
1 s+ 3 = 8
e−2t
−e−3t
(A.129)
以上により, インパルス応答y(t)が得られた.
問3 単位ステップ応答のラプラス変換は
L[us(t)] =1
s (A.130)
したがって,単位ステップ応答は
y(t) =L−1
[G(s)Us(s)] =L−1 8 s2+5s+6×
1 s =L
−1 8 s(s+2)(s+3)
(A.131)
となる.これを留数(ヘビサイド)の定理を用いて解く.
8
s(s+ 2)(s+ 3)を留数(ヘビサイドの展開定理)を用いて部分分数展開する.
8
s(s+ 2)(s+ 3)= α s +
β s+ 2+
γ
s+ 3 (A.132)
式(A.132)の未定係数α, β, γを留数(ヘビサイドの展開定理)を用いて分解す
る.そして,左辺と右辺を入れ替える.すなわち,
α s+
β s+ 2+
γ s+ 3=
8
s(s+ 2)(s+ 3) (A.133)
(1) まず,αを求める.式(A.133)の両辺に未定係数αの分母の式sを掛けると,
α+ sβ s+ 2+
sγ s+ 3=
s×8 s(s+ 2)(s+ 3)=
8
(s+ 2)(s+ 3) (A.134)
ここで,式(A.133)の未定係数αの分母多項式sを0とする値,すなわち,
s= 0を式(A.134)に代入すると,左辺はαだけが残り,以下の式を得る.
α= 8
(s+ 2)(s+ 3) s
=0
= 8
2×3 = 8 6=
4
3 (A.135)
(2) つぎに,βを求める.式(A.133)の両辺に未定係数βの分母の式s+ 6を掛
けると,
(s+ 2)α
s +β+ (s+ 2)γs+ 3 =
(s+ 2)×8 s(s+ 2)(s+ 3)=
8
ここで,式(A.133)の未定係数βの分母多項式s+ 2を0とする値,すなわ
ち,s=−2を式(A.136)に代入すると,左辺はβだけが残り,以下の式を
得る.
β= 8 s(s+ 3)
s=
−2
= 8
−2×1=−4 (A.137)
(3) 最後に,γを求める.式(A.133)の両辺に未定係数γの分母の式s+ 3を掛 けると,
(s+ 3)α s +
(s+ 3)β s+ 2 +γ=
(s+ 3)×8 s(s+ 2)(s+ 3)=
8
s(s+ 2) (A.138)
ここで,式(A.133)の未定係数γの分母多項式s+ 3を0とする値,すなわ
ち,s=−3を式(A.136)に代入すると,左辺はγだけが残り,以下の式を
得る.
γ= 8 s(s+ 2)
s
=−3
= 8
−3×(−1)= 8
3 (A.139)
よって,得られたα,β,γを式(A.133)に代入すると次のようになる.
8
s(s+ 2)(s+ 3)= 4 3 1 s−4
1 s+ 2+
8 3
1
s+ 3 (A.140)
よってこれを逆ラプラス変換すると,
y(t) =L−1
[Y(s)] =L−1
[G(s)Us(s)] =L−14 3 1 s−4
1 s+ 2+
8 3
1 s+ 3
=4 3−4e
−2t +8
3e
−3t
(A.141)
以上により, 単位ステップ応答y(t)が得られた.
15.6 問1 フィードバックシステムのブロック線図は図A.17のとおりである.
図A.17 15.6問1
問2 Gur(s), Gud(s), Gyr(s), Gyd(s)をP(s), C(s)を用いて求めるために,以下の 式(A.142),(A.143)を作成する.
U(s) =Gur(s)R(s) +Gud(s)D(s) (A.142)
Y(s) =Gyr(s)R(s) +Gyd(s)D(s) (A.143)
伝達関数Gyr(s)を求めるポイントは,外乱D(s) = 0として式(12.29)から計算 する.すなわち,次の式群を用いる.
⎧ ⎪ ⎨ ⎪ ⎩
E(s) =R(s)−Y(s) ア U(s) =C(s)E(s) イ Y(s) =P(s)U(s) ウ
(A.144)
式(A.144)の式イに式アを代入してE(s)を消去するとU(s) =C(s)(R(s)−
Y(s))を得る.ここでの目的は,Y(s)とR(s)との関係を求めることであるか
ら,これに式(A.144)の式ウを代入してU(s)を消去する.以上を整理すると,
Gyr(s) =Y(s) R(s)=
P(s)C(s)
1 +P(s)C(s)を得る.
問3 問2と同様に式(A.142)を用いる.Gyd(s)を求めるときは,目標値R(s) = 0
として式(12.29)から計算する.すなわち,次の式群を用いる.
⎧ ⎪ ⎨
⎪ ⎩
E(s) =−Y(s) エ U(s) =C(s)E(s) イ
Y(s) =P(s)(U(s) +D(s)) オ
(A.145)
式(A.145)の式イに式エを代入してE(s)を消去するとU(s) =−C(s)Y(s)を
得る.ここでの目的は,Y(s)とD(s)との関係を求めることであるから,これに
式(A.145)の式オを代入してU(s)を消去する。以上を整理すると,
Gyd(s) =Y(s) D(s)=
P(s)
1 +P(s)C(s) (A.146)
を得る.
15.7 問1 (1) 条件1全ての係数および定数が正であること
(2) 条件2欠項がないこと
以上より,a−2>0およびb >0が必要な条件である.
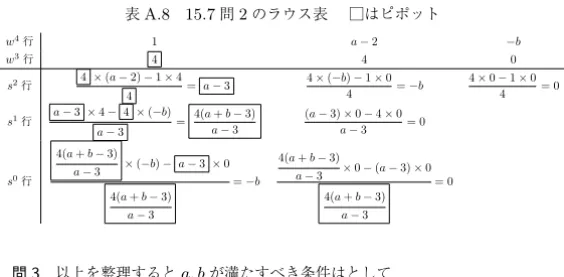
問2 ラウスの安定判別法を適用する.ラウス表は表A.8のとおりとなる.ラウス表
より,ラウス数列を求めると
1, 4, a−3, 4(a+b−3) a−3 , −b
表A.8 15.7問2のラウス表 □はピポット
w4行 1 a
−2 −b
w3行
4 4 0
s2行 4×(a−2)−1×4
4 =
a−3 4×(−b)−1×0
4 =−b
4×0−1×0
4 = 0
s1行 a−3 ×4−4×(−b)
a−3 =
4(a+b−3)
a−3
(a−3)×0−4×0
a−3 = 0
s0行
4(a+b−3)
a−3 ×(−b)−a−3×0
4(a+b−3)
a−3
=−b
4(a+b−3)
a−3 ×0−(a−3)×0
4(a+b−3)
a−3
= 0
問3 以上を整理するとa, bが満たすべき条件はとして,
a >3
b >−a+ 3 (A.147) b <0
が求められ,図A.18中のもっとも密度の濃いクロスハッチング部となる.ただ
し,境界は含まない.
図A.18 aとbが満たすべき条件の範囲
15.8 問1
G(s) = 10
式(A.148)の規格化を行う.そのために分母分子を10で割る.
G(s) = 10 10 1 10s+ 1
= 1
1 10s+ 1
(A.149)
1
10s= 1となるs= 10[rad/s]が折れ点周波数(遮断周波数)ωcとなり,ボード
線図の折れ線近似を描くと図A.19となる.
問2 与式を次のように変形し要素分解する.
G(s) = 50s+ 100 (s+ 1)(s+ 10)=
50s+ 100 10
(s+ 1)(1 10s+
10 10)
= 5s+ 10
(s+ 1)(1 10s+ 1)
= 10(1
2s+ 1)
(s+ 1)(1 10s+ 1)
(A.150)
よって
G(s) =G1(s)·G2(s)·G3(s)·G4(s) (A.151)
の四要素に分ける.ただし,
G1(s) = 10, G2(s) =1
2s+ 1, G3(s) = 1
s+ 1, G4(s) = 1 1 10s+ 1
(A.152)
となり,ボード線図の折れ線近似を描くと図A.20となる.なお,点は折れ点周波
数を示す.
15.9 L(s)の周波数伝達関数を以下に求める.
L(s) = K
s(s2+ 2s+ 1) (A.153)
式(A.153)のsにjωを代入する.
L(jω) = K
jω((jω)2+ 2(jω) + 1)=
K
jω(−ω2+ 2jω+ 1)=
K
−2ω2−(ω3−ω)j
= K{−2ω
2
+j(ω3−ω)}
{−2ω2−j(ω3−ω)}{−2ω2+j(ω3−ω)}=
−2Kω2+jK(ω3−ω)
(2ω2)2+ (ω3−ω)2 (A.154)
フィードバック制御系が安定であるかどうかを調べるために,虚数軸を横切る位置を調
10
−2
10
−1
10
0
10
1
10
2
10
3
10
4
0
−50
10
−2
10
−1
10
0
10
1
10
2
10
3
10
4
0
−100
図A.19 15.8問1
10
−2
10
−1
10
0
10
1
10
2
10
3
10
4
0
−100
10
−2
10
−1
10
0
10
1
10
2
10
3
10
4
0
−100 −50
図A.20 15.8問2
ことである.すなわち,ω3
−ω= 0 となり,物理的に意味を持つ値はω0= 1となる.
このとき
L(jω0) =− 2K
4 =−
K
2 (A.155)
したがって,L(jω)のベクトル軌跡と実軸の交点は−K2 +j0となる.よって,ナイキ
ストの安定判別法により0< K <2のとき,ベクトル軌跡は−1 +j0を左に見て実軸
を横切ることになるので,安定となる.
15.10 問1 伝達関数を求めるためにラプラス変換すると
L[¨y(t) + 4 ˙y(t) + 5y(t)] =L[f(t)] (s2+ 4s+ 5)Y(s) =F(s)
G(s) =Y(s) F(s)=
1
s2+ 4s+ 5 (A.156)
したがって,特性方程式は,s2+ 4s+ 5 = 0となる.この式を完全平方すると
(s+ 2)2+ 1 = 0となり,極はs=
−2±jとなる.
問2 システムの方程式は,以下のとおりに書き換えられる.
¨
y(t) + 4 ˙y(t) + 5y(t) =−7 ˙y(t)−5y(t) + 10u(t) ¨
y(t) + 11 ˙y(t) + 10y(t) = 10u(t) (A.157)
伝達関数を求めるためにラプラス変換すると
L[¨y(t) + 11 ˙y(t) + 10y(t)] =L[10u(t)]
(s2+ 11s+ 10)Y(s) = 10U(s) (A.158)
したがって,求める伝達関数は,G(s) = Y(s) U(s) =
10
問3 ボード線図を描くために,伝達関数を要素に分けると,以下のとおりに書き換え られる.
G(s) = 10 s2+ 11s+ 10 =
10 (s+ 10)(s+ 1)
=10 10×
1 1 10s+ 1
×s+ 11
= 1
0.1s+ 1× 1
s+ 1=G1(s)×G2(s) (A.159)
したがって,折れ点周波数(遮断周波数)ωcが,それぞれωc= 10 [rad/s]およ
びωc = 1 [rad/s]となることがわかる.ボード線図は1次遅れ要素G1(s) =
1
0.1s+ 1, G2(s) = 1
s+ 1 合計2個の伝達関数を書きあわせるとよい.図A.21
にゲイン線図と位相線図を示す.赤色破線が伝達関数G1(s), G2(s)個々の結果
と●がG1(s)の折れ点周波数,◇がG2(s)の折れ点周波数であり,破線が合成の
伝達関数の結果を示す.
問4 図15.1より,伝達関数をG(s)と積分補償器 1
s から開ループ伝達関数L(s)
を求めるとL(s) = G(s)
s となる.これから閉ループ系一巡伝達関数H(s)は
H(s) = L(s)
1 +L(s)となり関係を整理すると以下のとおりとなる.
H(s) =Y(s) U(s)=
L(s) 1 +L(s)=
G(s) s s+G(s)
s
= G(s)
s+G(s) (A.160)
ここに,G(s) = 10
s2+ 11s+ 10 を代入し整理すると,
H(s) =
10 s2+ 11s+ 10
s+ 10 s2+ 11s+ 10
=
10 s2+ 11s+ 10 s3+ 11s2+ 10s+ 10
(s2+ 11s+ 10)
= 10
s3+ 11s2+ 10s+ 10
(A.161)
よって,特性多項式は,s3+ 11s2+ 10s+ 10となる.ここで,得られた特性多
項式についてラウスの安定判別法を用いる.式(A.161)は
条件1)全ての係数および定数が正である
条件2)欠項がない
を満たすことから,ラウスの安定判別法が使える.
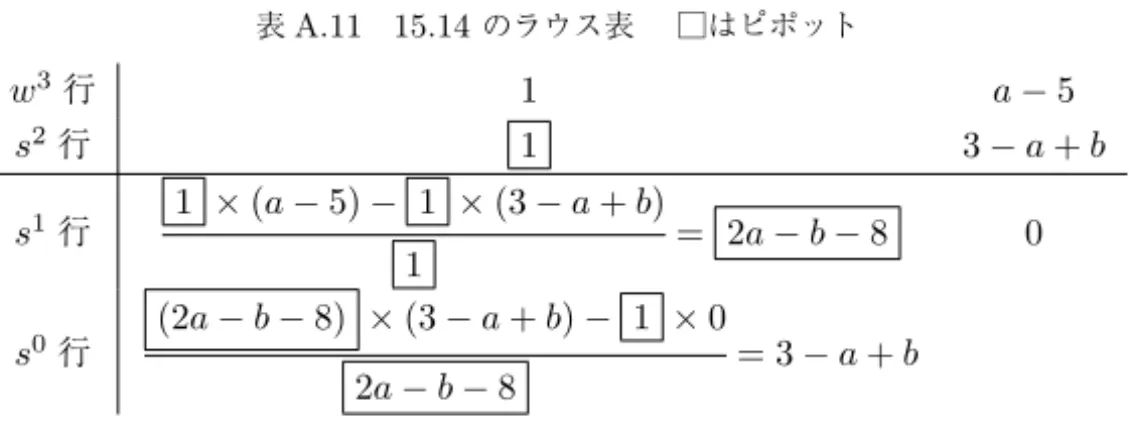
表A.9のラウス表より,ラウス数列は
1, 11, 100 11, 10
10
−2
10
−1
10
0
10
1
10
2
10
3
10
4
0
−100
10
−3
10
−2
10
−1
10
0
10
1
10
2
10
3
10
4
0
−200 −100
図A.21 15.10問3
表A.9 15.10問4
s3
1 10
s2
11 10
s1 11 ×10−1×10
11 =
100 11 0
s0
100
11 ×10− 11 ×0 100
11
= 10
15.11 問1 説明文より2本の方程式は以下のとおりとなる.
Ay(t) =˙ u(t)−d(t)
d(t) =y(t)
Γ (A.162)
問2 説明文中の2本の方程式をラプラス変換すると以下のとおりとなる.
AsY(s) =U(s)−D(s)
D(s) = 1
ΓY(s) (A.163)
式(A.162)からD(s)を消去すると以下のとおりとなる.
AsY(s) =U(s)−1
ΓY(s) (A.164)
入力U(s)と出力Y(s)とに分けて整理すると以下のとおりとなる.
As+1
Γ
Y(s) =U(s) (A.165)
よって求める伝達関数G(s)は
G(s) =Y(s) U(s)=
Γ
AΓs+ 1 (A.166)
となる.
問3 伝達関数G(s)と積分補償器K
s とを構成した閉ループ系一巡伝達関数H(s)は
H(s) = L(s)
![図 A.5 ゲイン特性 ( 左上 i), 右上 ii), 左下 iii), 右下 iv)) 8.5 T = 0.1 , 10 の場合,折れ点周波数 ω c はそれぞれ 10 , 0.1[rad/s] となる.また位相線 図は折れ点周波数において 45[deg] 遅れる](https://thumb-ap.123doks.com/thumbv2/123deta/6700681.210054/17.845.96.761.152.1123/ゲインT点周ωそれぞれなるまた位相折れ点周波数おい遅れる.webp)